目标检测模型Yolov3
介绍
Yolo方法是目标检测的常用算法,是一种典型的one-stage检测方法。比起two-stage的方法,one-stage的Yolo方法少了一次卷积获得proposal的过程,直接从图像中用一个卷积神经网络得出预测结果。特点是快而且精确度较高,略低于two-stage方法。Yolo的全称是you only look once,意为只检测一次,与其只有一个卷积网络吻合。是一种兼顾速度与准确率的方法。
特点:end-to-end
end-to-end的意思是,输入是最原始的数据,输出是想要得到的结果,不需要额外对数据集进行处理,也不需要对结果再进行加工。特征的提取,训练都在算法内部。 这使得yolo网络目标明确,方便使用。
特点:回归问题
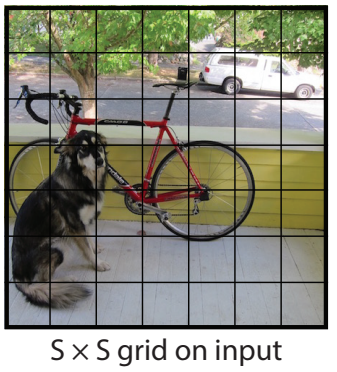
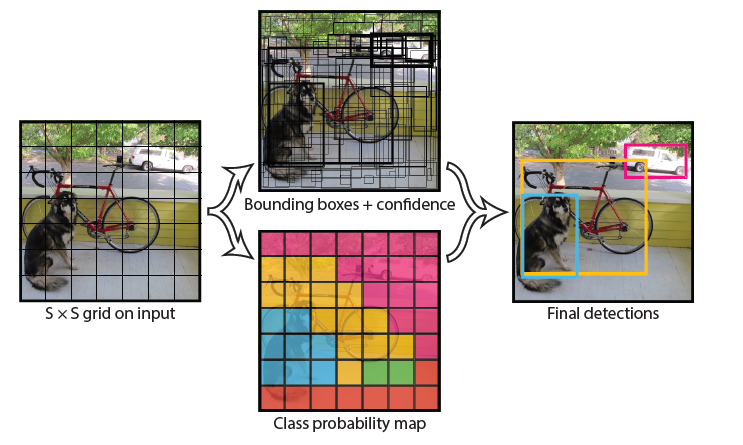
Yolo中的检测是一个回归问题,把受检测图片划分为\(S \cdot S\)个格子,然后对于每一个格子,预测五个值,(x,y,w,h,confidence)。
x,y 分别为boundingbox的中心坐标(相对于本格子)
w,h 分别为boundingbox的宽度和高度
confidence 为置信度,计算为\(confidence = P \cdot IOU\),P为groundtruth是否在本格子里,是为1,否为0;IOU为预测的boundingbox与实际groundtruth的交集比上并集的比值。
生成的时候要对每个格子生成\(2 \cdot boundingbox + classes\)数量的预测值。总共就是\((S \cdot S \cdot (2 \cdot B + C))\)个值。 一个总的流程大意图如下:
以上原理是Yolov1的原理和思想,v3与其基本思想一致,网络结构上有一些差异,v3的网络结构如下图:
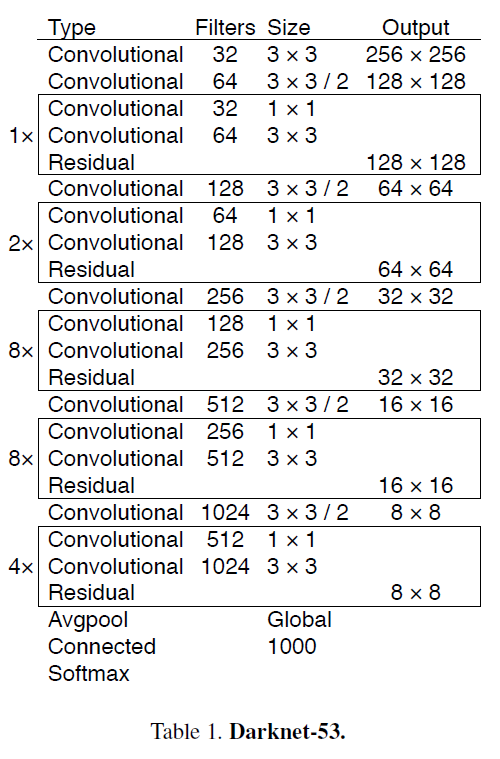
其网络结构有53个卷积层。
优点
只进行一次检测,速度较快
输入输出为原图片和检测结果,便于使用
精确度较高
适用领域
稍微大型的目标检测问题
参考文献
@inproceedings{redmon2016you,
title={You only look once: Unified, real-time object detection},
author={Redmon, Joseph and Divvala, Santosh and Girshick, Ross and Farhadi, Ali},
booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition},
pages={779--788},
year={2016}
}
@article{redmon2018yolov3,
title={Yolov3: An incremental improvement},
author={Redmon, Joseph and Farhadi, Ali},
journal={arXiv preprint arXiv:1804.02767},
year={2018}
}