目标检测模型Faster R-CNN
简介
Faster R-CNN 是目标检测领域最为经典双阶段的方法之一,通过 RPN(Region Proposal Networks) 区域提取网络和 R-CNN 网络联合训练实现高效目标检测。
发展历程
R-CNN。首先通过传统的 selective search 算法在图片上预取 2000 个左右 Region Proposal;接着将这些 Region Proposal 通过前处理统一尺寸输入到 CNN 中进行特征提取;然后把所提取的特征输入到 SVM 支持向量机中进行分类;最后对分类后的 Region Proposal 进行 bbox 回归。此时算法的整个过程较为繁琐,速度也较慢。
Fast R-CNN。首先通过传统的 selective search 算法在图片上预取 2000 个左右 Region Proposal;接着对整张图片进行特征提取;然后利用 Region Proposal 坐标在 CNN 的最后一个特征图上进去 RoI 特征图提取;最后将所有 RoI 特征输入到分类和回归模块中。此时算法的整个过程相比 R-CNN 得到极大的简化,但依然无法联合训练。
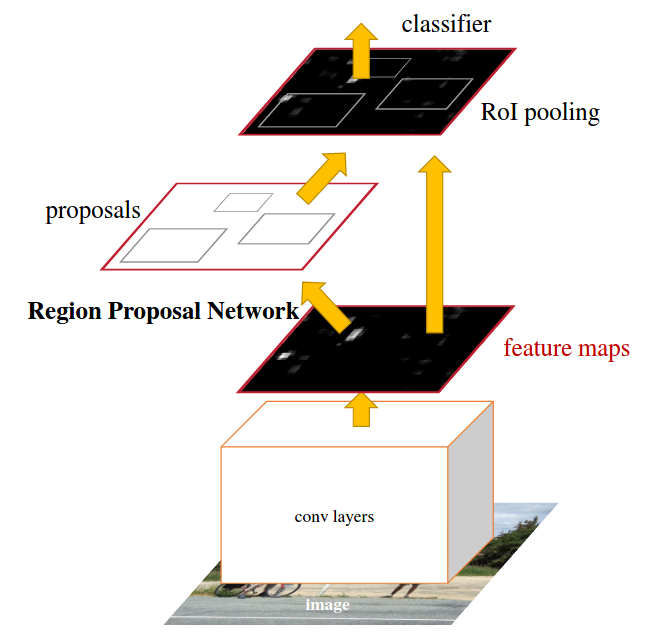
Faster R-CNN。首先通过可学习的 RPN 网络进行 Region Proposal 的预取;接着利用 Region Proposal 坐标在 CNN 的特征图上进行 RoI 特征图提取;然后利用 RoI Pooling 层进行空间池化使其所有特征图输出尺寸相同;最后将所有特征图输入到后续的 FC 层进行分类和回归。此时算法的整个过程一气呵成,实现了端到端训练。
特点:区域候选网络(Region Proposal Networks,RPN)
Faster R-CNN 的出现改变了整个目标检测算法的发展历程。之所以叫做 two-stage 检测器,原因是其包括一个区域提取网络 RPN 和 RoI Refine 网络 R-CNN,同时为了将 RPN 提取的不同大小的 RoI 特征图组成 batch 输入到后面的 R-CNN 中,在两者中间还插入了一个 RoI Pooling 层,可以保证任意大小特征图输入都可以变成指定大小输出。简要结构图如下所示:
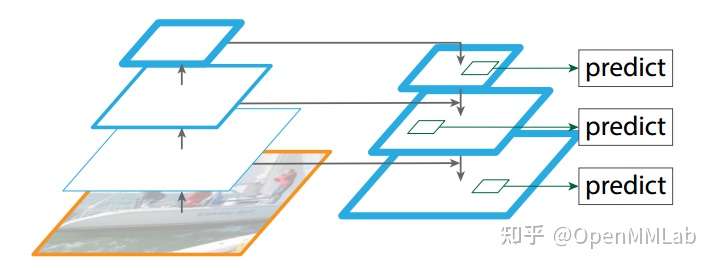
特点:特征金字塔(Feature Pyramid Networks,FPN)
Faster R-CNN 之后,考虑到多尺度预测问题,后续又提出了改进版本特征金字塔 FPN(Feature Pyramid Networks for Object Detection)。 通过分析目前目标检测中存在的图像金字塔、单层预测和多层预测问题,提出了一个简单的,通过从上到下路径和横向连接,结合高分辨率、弱语义信息的特征层和低分辨率、强语义信息的特征融合,实现类似图像金字塔效果,顶层特征通过上采样和低层特征做融合,而且每层都是独立预测的,效果显著,如下图所示:
由于其强大的性能,更加模块化现代化的设计,现在提到 Faster R-CNN, 一般默认是指的 FPN 网络。
优点
双阶段网络相比于单阶段网络,性能优越,检测精度高。
可以解决多尺度、小目标问题。
通用性强,适用各种目标检测任务,且便于迁移。
适用领域
目标检测
预训练模型
参考文献
@article{Ren_2017,
title={Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks},
journal={IEEE Transactions on Pattern Analysis and Machine Intelligence},
publisher={Institute of Electrical and Electronics Engineers (IEEE)},
author={Ren, Shaoqing and He, Kaiming and Girshick, Ross and Sun, Jian},
year={2017},
month={Jun},
}